
はじめに
第1章 学習する内容
1−1 全体の構成
1−2 必要なもの
第2章 ノートPCの準備
2−1 Linux(Ubuntu22.04 LTS)をインストール
■ イメージファイルをダウンロード
■ UbuntuイメージファイルをUSBに書き込む
■ USBからPCを起動
■ Ubuntu22.04LTSをインストール
■Windowsを削除してUbuntuをインストール
■Windowsを残してUbuntuをインストール
■インストールを継続
2−2 ROS2(humble)をインストール
■地域の設定
■リポジトリの設定
■ROS2をインストール
■環境設定
■サンプルを実行
2−3 トピック通信プログラム
■ワークスペースを作成
■パッケージを作成
■publisherノードを書く
■setup.pyファイルを編集
■subscriberノードを書く
■setup.pyファイルを編集
■ビルドして実行
第3章 ESP32 / micro-ROS for Arduinoの準備
3−1 Arduino IDEをインストール
■ESP32-DevKitCを設定
■動作確認
3−2 micro-ROS for Arduino
3−3 ROS2 / micro-ROS間のトピック通信
■ micro-ROS Publisher
■ micro-ROS Subscriber
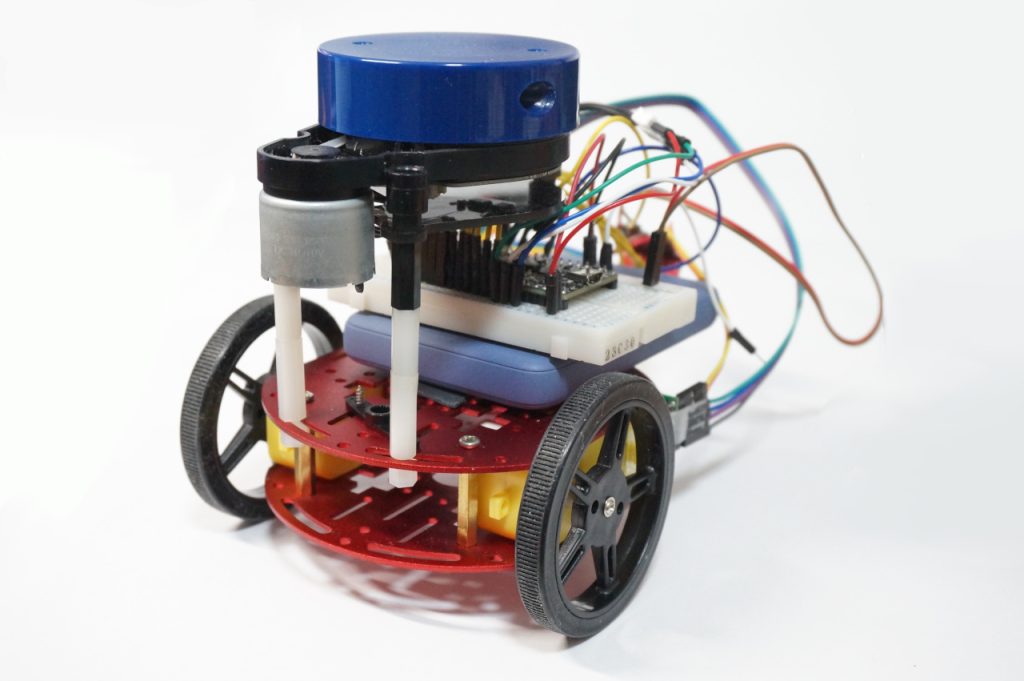
第4章 ロボットの準備
4−1 組み立てと配線
4−2 モーター駆動テスト
4−3 エンコーダテスト
4−4 サーボ(定速)走行
■直進
■旋回など
4−5 超音波センサー
第5章 ROS 2でロボットを操縦
5−1 コマンドの送受信
■送信側
■受信側
5−2 実走
第6章 SLAM
6−1 環境認識
■LaserScanメッセージ
■Rviz2で表示
■センサーデータを表示
■操縦プログラム
6−2 オドメトリ
6−3 Lidar
■YDLIDAR X2L
■データ読み取り
■RViz2で表示
■MAPを作成
■MAPを保存
6−4 ナビゲーション
■MAPをロードする
■ロボットの位置と向きを推定(localize)
■ナビゲーション
■終わりに

コメント