■歩行動作
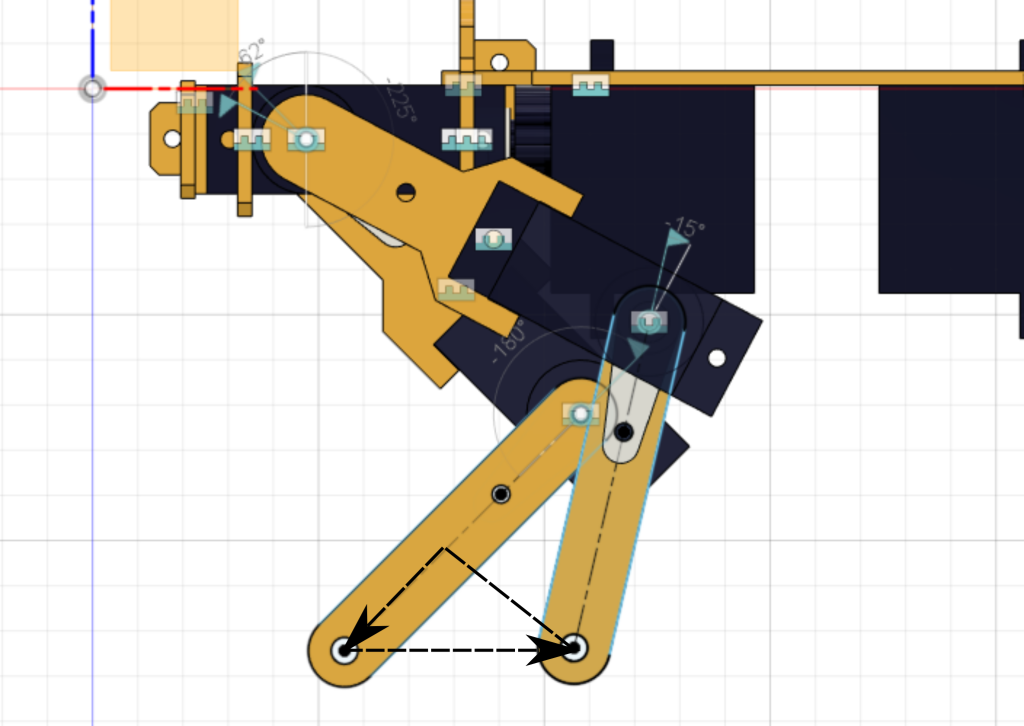
歩行動作を作成するためには、脚を前と後ろに振った状態での関節角度を調べる必要があります。CADが使える場合は、各関節を駆動しながらキーフレーム(離床、遊脚センター、着地)での関節角度を調べますが、ここではList14をコピーしてしまってください。
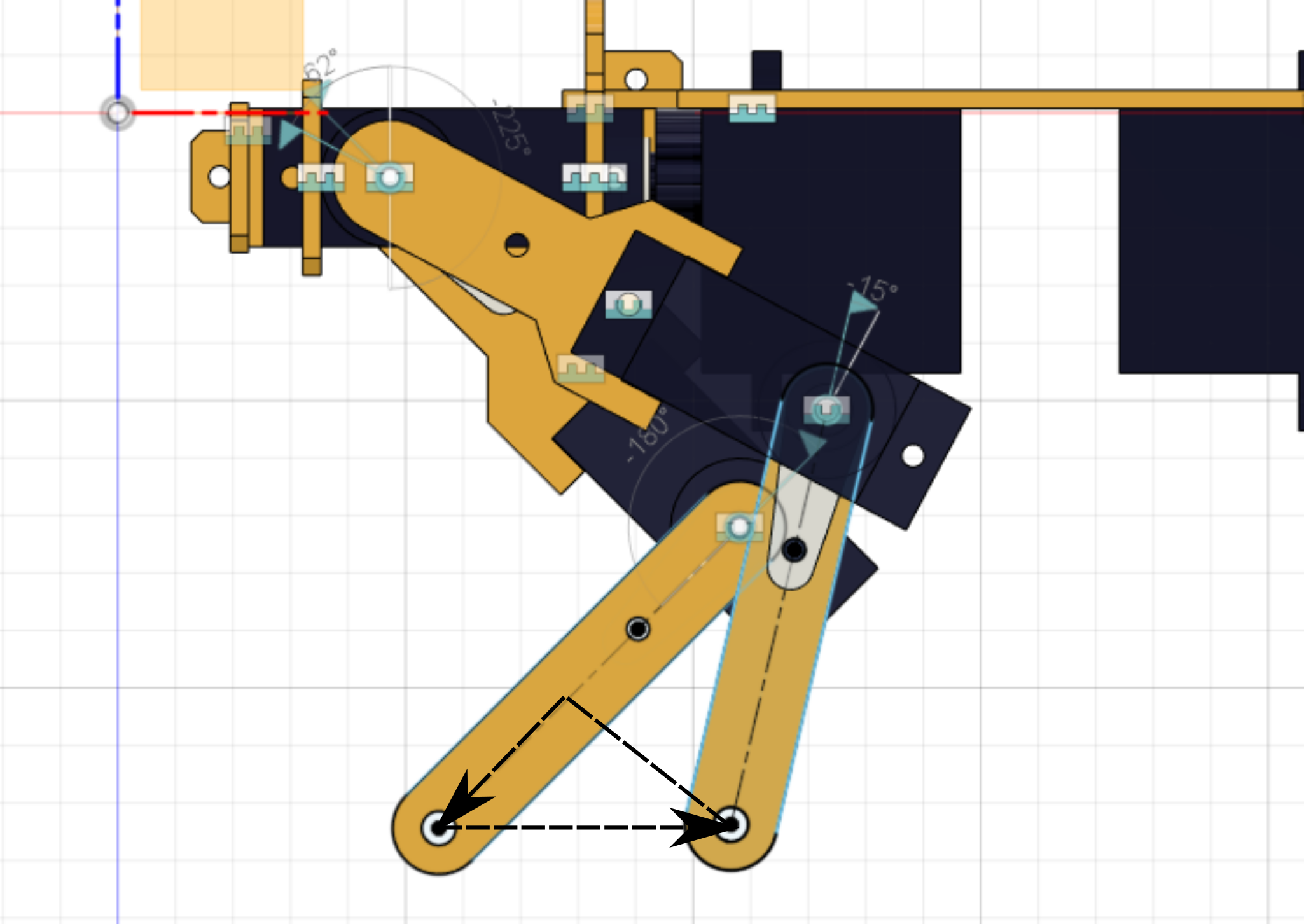
前進歩行用に作成したデータをリスト14に示します。膝関節を後ろに曲げている関係でロボットの重心がやや後ろに寄っています。このため足先の軌跡を後ろ側に寄せています。
List14 walk
angle = [\
[90,105, 70, 90, 86, 95, 90, 94, 85, 90, 75,110],\
[90,100,110, 90, 82,100, 90, 98, 80, 90, 80, 70],\
[90, 90, 90, 90, 78,105, 90,102, 75, 90, 90, 90],\
[90, 94, 85, 90, 75,110, 90,105, 70, 90, 86, 95],\
[90, 98, 80, 90, 80, 70, 90,100,110, 90, 82,100],\
[90,102, 75, 90, 90, 90, 90, 90, 90, 90, 78,105]\
]後退歩行は前進歩行の逆再生です。
List15 walk-back
angle = [\
[90,102, 75, 90, 90, 90, 90, 90, 90, 90, 78,105],\
[90, 98, 80, 90, 80, 70, 90,100,110, 90, 82,100],\
[90, 94, 85, 90, 75,110, 90,105, 70, 90, 86, 95],\
[90, 90, 90, 90, 78,105, 90,102, 75, 90, 90, 90],\
[90,100,110, 90, 82,100, 90, 98, 80, 90, 80, 70],\
[90,105, 70, 90, 86, 95, 90, 94, 85, 90, 75,110]\
]
コメント