ソフトウェアの準備
■プログラム開発環境の準備
ロボットを組み上げる前に基板の動作確認を行います。まずRaspberry Pi Pico単体でオンボードLEDの点灯を行い、その後製作したボードに搭載してサーボの駆動実験をします。本プロジェクトではソフトウェアの開発に「Thonny」という環境を使いますので、まずこれをインストールします。
●Thonnyをインストール
ダウンロードサイト
にアクセスし、画面右上のリンクからインストーラをダウンロードします。
基本的に画面の支持に従ってインストールします。途中「Create desktop icon」にチェックをいれてください。起動画面はこのような感じです。
試しにPythonのコードを実行してみましょう。「Shell」と書かれたエリアにコードを入力します。「‘ ‘」は「“ “」でも同じです。
print(‘Hello World!’)下の行に「Hello World!」と表示されることを確認してください。
●MicroPythonをインストール
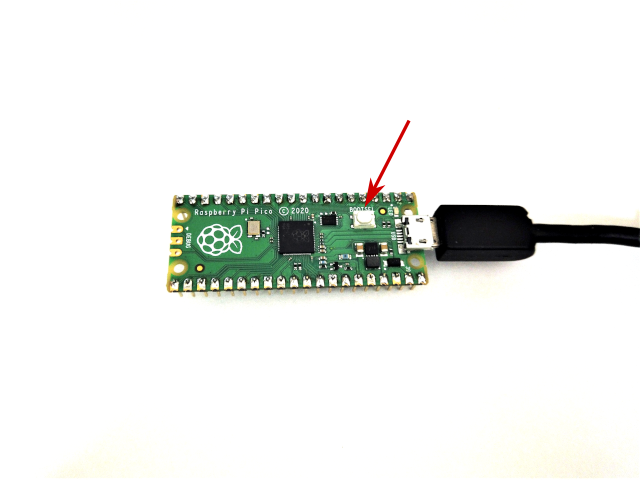
Raspberry Pi PicoでMicorPythonを初めて使う場合にはMicroPythonのファームウェアを追加する必要があります。Picoボード上の「BOOTSEL」と書かれたボタンを押しながらUSBケーブルをパソコンに接続します。
Thonnyウィンドウ右下のPythonのバージョンを表示したところを右クリックして、「MicroPython(Raspberry Pi Pico)」を選択します。

ダイアログボックスで「Install」をクリックします。

これでPicoでMicroPythonが使えるようになりました。次回USBケーブルをつなぐ際にはボタンを押す必要はありません。
Thonnyの下のShellの部分で同様にプログラムを打ち込んでみます。先ほどはパソコンがプログラムを実行しましたが、今回はPicoが結果を返しています。


コメント