秋月電子の姿勢モジュールBNO055をなんとか入手しましたので動かしてみました。少しお高いですが何もしなくてもI2Cでつなぐだけでオイラー角が得られるのはすごいです。姿勢の導出がブラックボックスになっても構わない人向けです。目視的には正しそうな値が出ています。
使い方はAdafruitのライブラリを持ってくるのが一般的なようですが、ちょっとブラックボックス度が過ぎると思いましたのでぱっと見で理解しやすそうなコードを掲載しておきます。
Arduino編
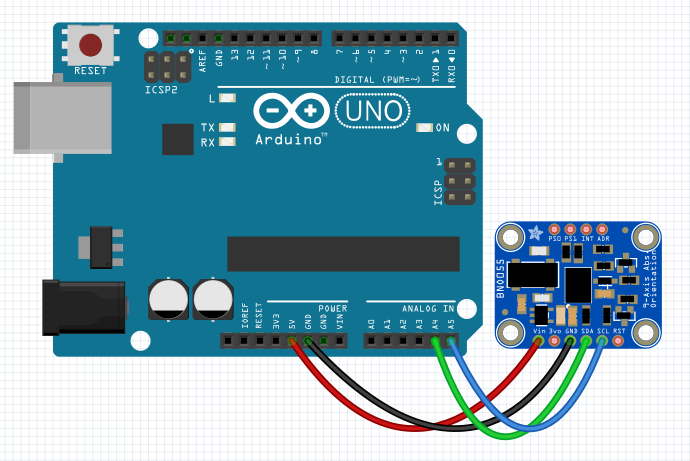
BNO055基板の絵は違うものです。Arduino の5Vをつなぎます。
#include <Wire.h>
byte ADDRESS = 0x28;
byte EULER_REGISTER = 0x1A;
int merge(byte low, byte high){
int result = low | (high << 8);
if (result > 32767){
result -= 65536;
}
return result;
}
void writeToBNO(byte reg, byte val, int dly){
Wire.beginTransmission(ADDRESS);
Wire.write(reg);
Wire.write(val);
Wire.endTransmission(false);
delay(dly);
}
void initBNO() {
Wire.beginTransmission(ADDRESS);
Wire.write(0x00);
Wire.endTransmission(false);
Wire.requestFrom(ADDRESS, 1);
if(Wire.read() == 0xa0){
Serial.println("BNO055 found.");
writeToBNO(0x3d, 0x00, 80); //operating mode = config mode
writeToBNO(0x3f, 0x20, 1000); //sys_trigger = rst_sys
writeToBNO(0x3e, 0x00, 80); //pwr_mode = normal mode
writeToBNO(0x3f, 0x80, 1000); //sys trigger = clk_sel ex_osc
writeToBNO(0x3d, 0x0c, 80); //operating mode = ndof
}else{
while(1){
Serial.println("BNO055 not found..");
delay(1000);
}
}
}
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
Wire.begin();
initBNO();
}
void loop() {
// put your main code here, to run repeatedly:
int euler[6];
Wire.beginTransmission(ADDRESS);
Wire.write(EULER_REGISTER);
Wire.endTransmission(false);
Wire.requestFrom(ADDRESS, 6);
byte buffer[6];
Wire.readBytes(buffer, 6);
euler[0] = merge(buffer[0], buffer[1]);
euler[1] = merge(buffer[2], buffer[3]);
euler[2] = merge(buffer[4], buffer[5]);
float yaw = float(euler[0]) / 16.0;
float roll = float(euler[1]) / 16.0;
float pitch = float(euler[2]) / 16.0;
Serial.print("yaw = ");
Serial.print(yaw);
Serial.print(" roll = ");
Serial.print(roll);
Serial.print(" pitch = ");
Serial.println(pitch);
delay(50);
}Raspberry Pi Pico編
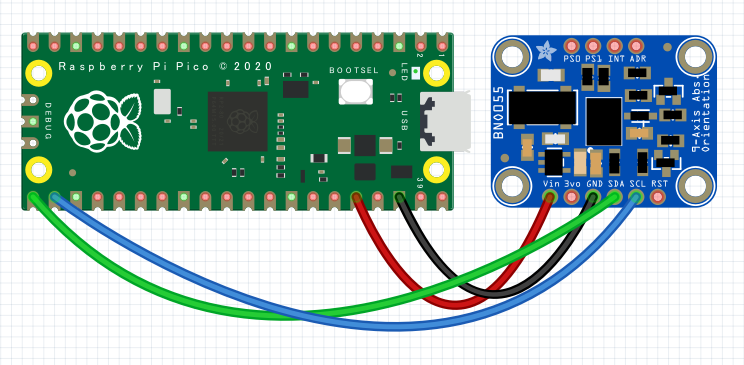
3.3Vをつなぎます。
import machine, utime
ADDRESS = 0x28
EULER_REGISTER = 0x1A
i2c = machine.I2C(0, sda=machine.Pin(16), scl=machine.Pin(17), freq=100_000)
buffer = bytearray(6)
euler = [0, 0, 0]
def merge(low,high):
result = low | (high << 8)
if result > 32767:
result -= 65536
return result
def init():
if i2c.readfrom_mem(ADDRESS, 0x00, 1) == b'\xa0': #chip id
#operating mode = config mode
#sys_trigger = rst_sys
#pwr_mode = normal mode
#sys trigger = clk_sel ex_osc
#operating mode = ndof
config=[(0x3d, b'\x00', 80),\
(0x3f, b'\x20', 1000),\
(0x3e, b'\x00', 80),\
(0x07, b'\x00', 80),\
(0x3f, b'\x80', 1000),\
(0x3d, b'\x0c', 80)]
for register, value, delay in config:
i2c.writeto_mem(ADDRESS, register, value)
utime.sleep_ms(delay)
else:
while True:
print("bno055 not found...")
utime.sleep_ms(1000)
init()
while True:
try:
i2c.readfrom_mem_into(ADDRESS, EULER_REGISTER, buffer)
except Exception as error:
pass
euler[0] = merge(buffer[0], buffer[1])
euler[1] = merge(buffer[2], buffer[3])
euler[2] = merge(buffer[4], buffer[5])
yaw = float(euler[0]/16)
roll = float(euler[1]/16)
pitch = float(euler[2]/16)
print('yaw:',yaw,'roll:',roll,'pitch:',pitch)
utime.sleep_ms(50)

コメント