ロボット組み立て
ロボットを組み立てていきます。サーボの出力軸は全て90°の位置になっているものとします。けがをしないようにゆっくり進めていきましょう。
FS0307のねじ止め用の凸部分は非常に薄く、損傷しやすいのでねじ止めの際など無理に力を加えず細心の注意を払って作業してください。
■ボディ部の組み立て
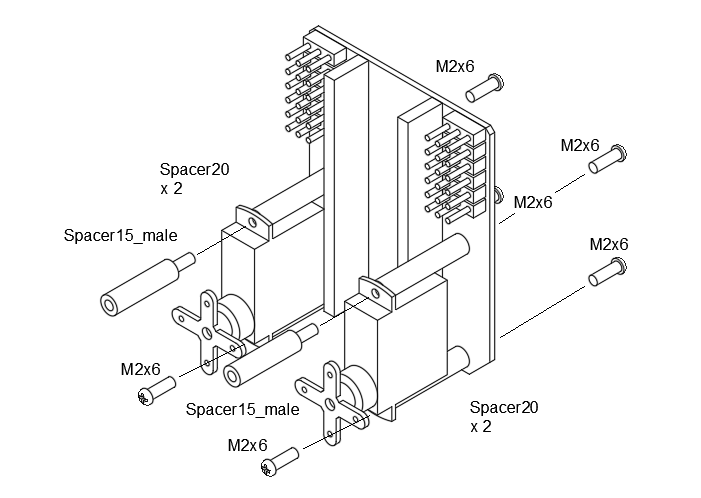
main_boardに股関節ロール軸用のサーボ2個を取り付けます。サーボの出力軸が下側になるようにします。台座となる樹脂スペーサは20mmタイプで裏側からM2x6mmのネジで止め、表側は上は15mm(メス-オス)樹脂スペーサでサーボの締結部をはさんで共締め、下は同じM2x6mmネジで止めます。
十字タイプのサーボホーンをおおよそ直角方向になるように取り付けますが、サーボに付属のネジはまだ使いません。
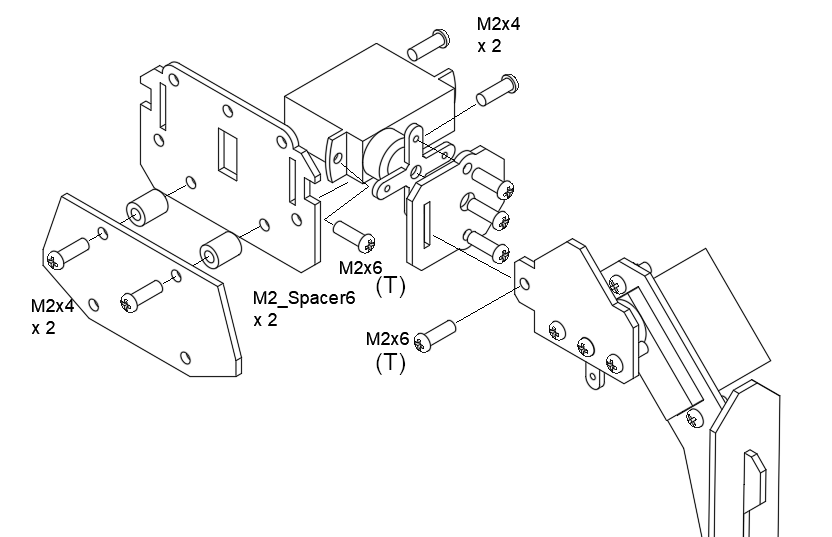
■脚部の組み立て
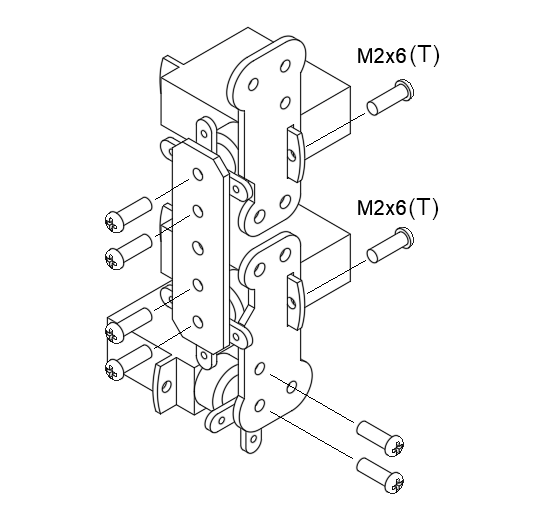
股関節ピッチ軸、足首ピッチ軸、足首ロール軸用のサーボをそれぞれプレートで接続します。プレートとサーボの筐体の締結はM2x6mmのタッピングネジを使い、サーボホーンとプレートはサーボに付属のネジの長いほう2本を使って共締めします。右足も左足と対称になるように組み立ててください。
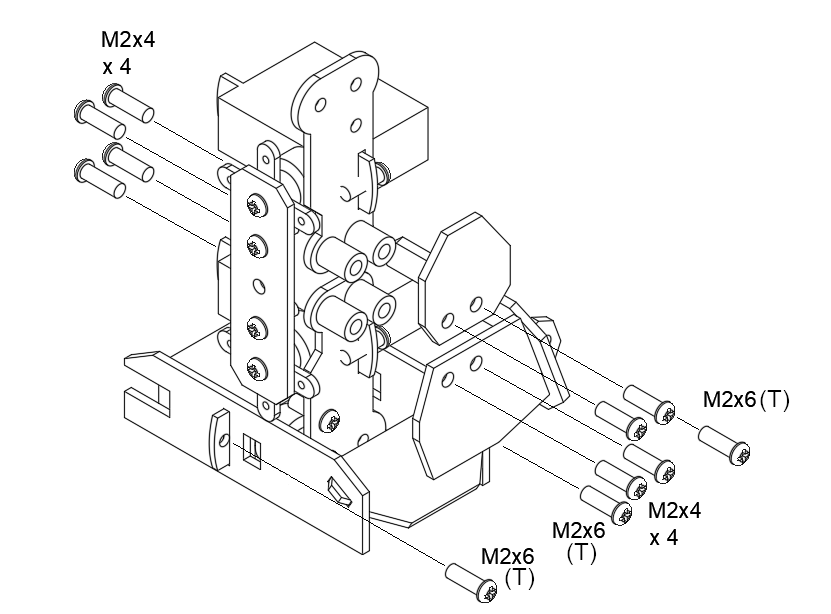
フット部分はプレートでロール軸のサーボを両側からはさむ形で取り付け、M2x6mmのタッピングネジで締結します。前面の装飾部品は6mmの樹脂スペーサを台座にして表と裏からM2x4mmのネジで止めます。
右足も左足と対称になるように組み立ててください。
■腕部の組み立て
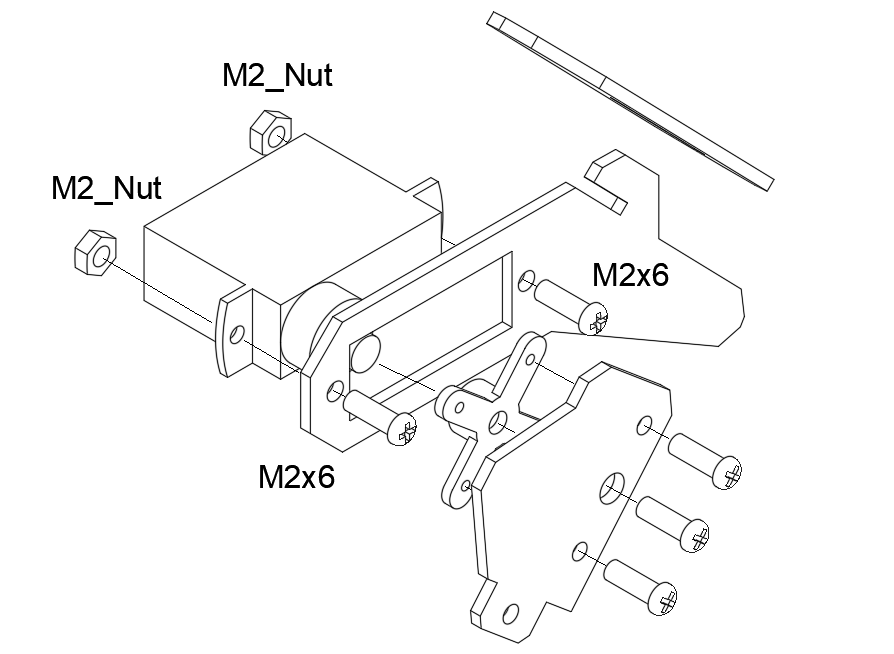
腕のロール軸を組み立てます。サーボはM2x6mmネジとM2ナットで取り付けます。
サーボホーンはサーボに付属のネジを使いますが、サーボを90°にセットした状態でサーボホーンを45°回して取り付け、図4-18のような角度関係になるようにしてください。腕の可動範囲の関係でこのようにしています。
装飾用のプレートが緩い場合は接着してしまってください。
右腕側も対称になるように組み立ててください。
■フロントプレートに腕を取り付け
ボディの前面プレートに腕のピッチ軸用サーボと腕のアセンブリを取り付けます。先にサーボホーンにプレートをネジ止めしてから、腕のアセンブリを差し込みます。
■全体の組み立て
●ワイヤーの整理
表4-1を参照してサーボワイヤーを基板のコネクタに接続し、余った部分をうまくボディに収めます。
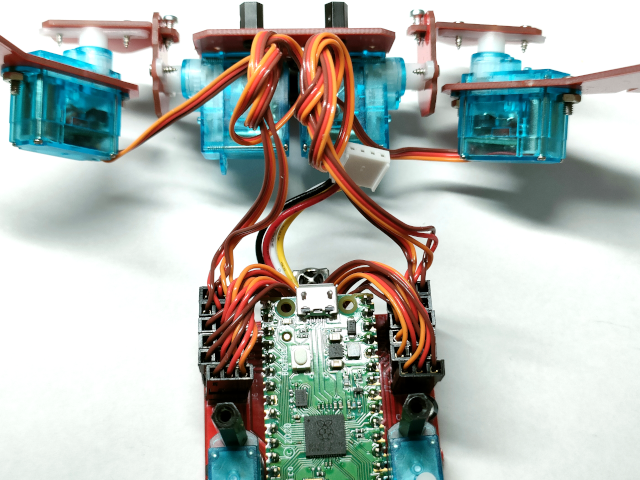
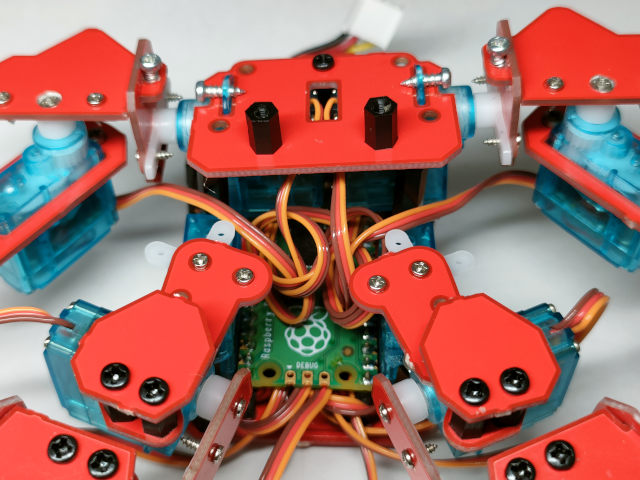
足部のワイヤーはまとめてコネクタの間を通してPico基板でふたをします。(図4-6)引っ張りすぎると関節が自由に動かなくなりますので気を付けてください。腕は、ワイヤー長さを調節するために左右2本ずつを1回軽く結んでからサーボコネクタにさします。(図4-7)結んで丸まったワイヤーは腹の部分に収まるように取り付けます。
各サーボはワイヤーをきつく引っ張りすぎると動作に影響を与えますので適度に緩めておきましょう。
表 4-1 ロボットの関節とサーボ
| SV0 | GPIO0 | J1 | Right Shoulder Roll | 右肩関節ロール軸 |
| SV1 | GPIO1 | J2 | Right Shoulder Pitch | 右肩関節ピッチ軸 |
| SV2 | GPIO2 | J3 | Right Hip Roll | 右股関節ロール軸 |
| SV3 | GPIO3 | J4 | Right Hip Pitch | 右股関節ピッチ軸 |
| SV4 | GPIO8 | J5 | Right Ankle Pitch | 右足首関節ピッチ軸 |
| SV5 | GPIO9 | J6 | Right Ankle Roll | 右足首関節ロール軸 |
| SV6 | GPIO20 | J7 | Left Ankle Roll | 左足首関節ロール軸 |
| SV7 | GPIO21 | J8 | Left Ankle Pitch | 左足首関節ピッチ軸 |
| SV8 | GPIO22 | J9 | Left Hip Pitch | 左股関節ピッチ軸 |
| SV9 | GPIO26 | J10 | Left Hip Roll | 左股関節ロール軸 |
| SV10 | GPIO27 | J11 | Left Shoulder Pitch | 左肩関節ピッチ軸 |
| SV11 | GPIO28 | J12 | Left Shoulder Roll | 左肩関節ロール軸 |
●バッテリーの取り付け
バッテリーはヘッド部の裏側に配置します。

コメント