■リモコンを使う
赤外線リモコンでロボットをコントロールしてみます。ここではキットに付属のリモコン送信機を使います。ボタン電池(CR2025)を挿入しておいてください。リモコンの受信部はメインボード基板上部の3本足の部品です。
■リモコン信号
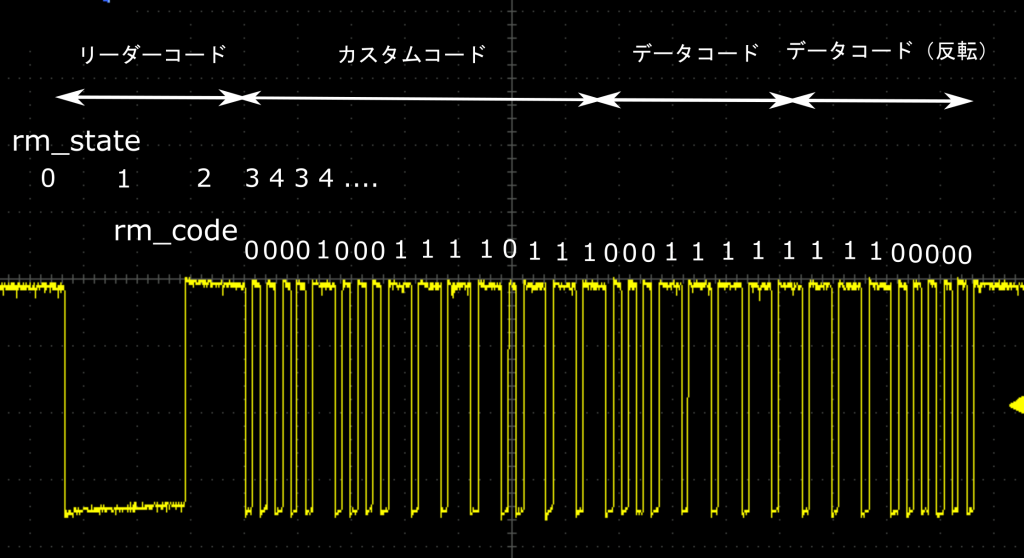
図は受信したリモコン信号の1例です。NECフォーマットと呼ばれるものです。縦軸が電圧、横軸が時間で、左側からHIGH、LOW、HIGH、LOW...とバーコードのような信号がリモコン受光部から得られます。これをRaspberry Pi Picoの28番端子に入力します。一応注意が必要なのが、HIGHが1信号を表しLOWが0信号を表すことにはならない、ということです。LOWの後に長いHIGHが来ると1、LOWの後に短いHIGHが来ると0と判断します。ここで長い、短いと言っている時間は仕様で決まっています。
プログラムでは、28番端子の入力状態をチェックしてHIGHの長さ、LOWの長さを時間計測しながら信号を解析(デコード)していきます。信号全体はリーダー、カスタムコード(16bit)、データコード(8bit)、データコード(8bit-反転)の順にやってきますのでその順に処理していき、今回はデータコード(8bit)の値を見てどのボタンが押されたのかを判断します。


コメント