ロボット組み立て
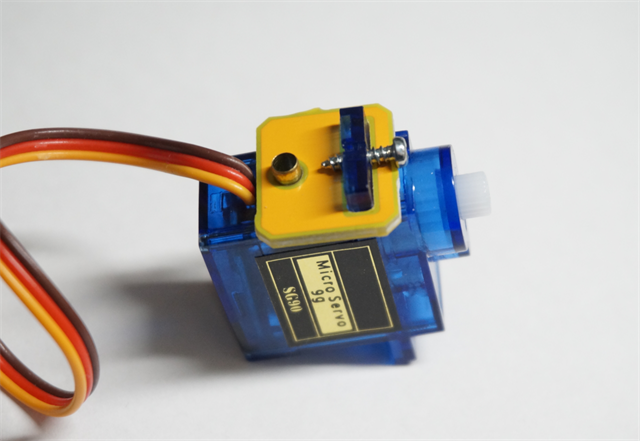
ロボットを組み立てていきます。サーボの出力軸は全て90°の位置になっているものとします。けがをしないようにゆっくり進めていきましょう。
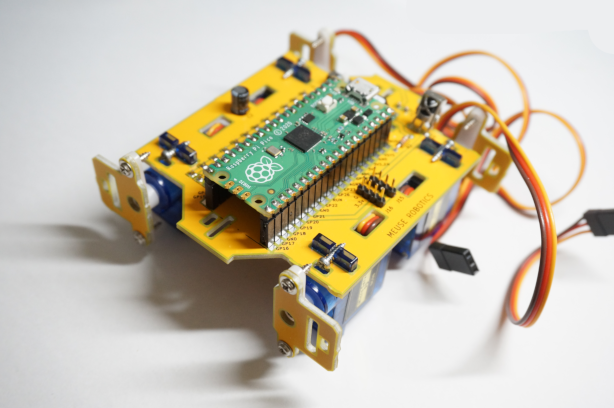
■ボディ部の組み立て
main_boardに股(肩)関節ロール軸用のサーボ4個を取り付けます。サーボの出力軸が上側になるようにリブをボードの長穴に挿し込み、M2x8mmのタッピングスクリューで横からサーボリブの穴にねじ止めします。
*ネジがゆるい場合は予備のM2.3のネジを使用してください。
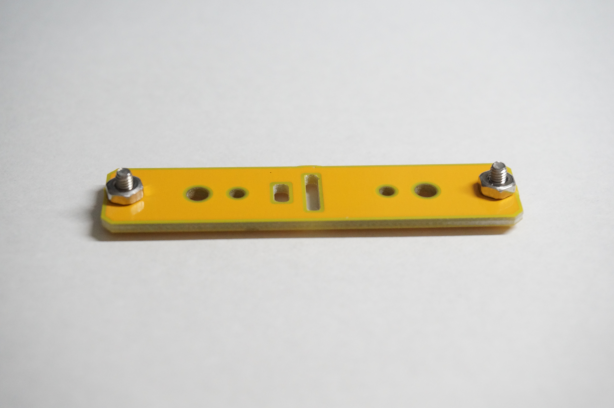
両腕タイプのサーボホーンをおおよそ縦方向になるように取り付け、サーボに付属の短いほうのネジでねじ止めします。当該部品(図を参照)を合わせて、長いほうのネジを使ってサーボホーンに共締めします。長いほうのねじは固いので、あらかじめサーボホーン単品の状態でねじを切っておいたほうがよいと思います。前後左右で対称になるように部品を取り付けます。
■脚部の組み立て
股(肩)関節ピッチ軸用のサーボ4個にそれぞれプレートを取り付けます。丸穴にハトメを通してサーボの出力軸側のリブにM2x8mmのタッピングスクリューでねじ止めします。
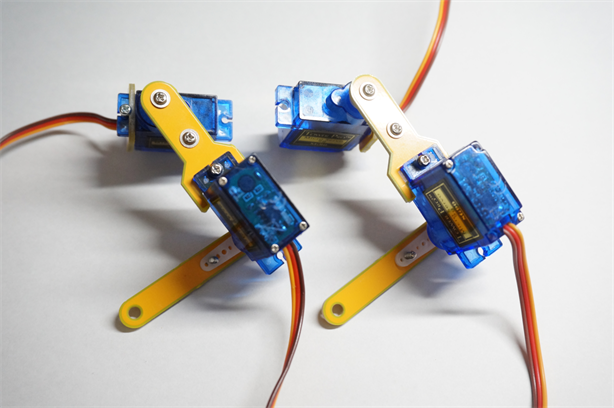
ひざ(ひじ)関節用のサーボにパーツを取り付けます。左右の脚で組み立てが対称となりますので、左脚は上側の図を、右脚は下側の図を参照してください。股(肩)関節側はY字型の部品に片腕タイプのサーボホーンをサーボ付属の長ネジで取り付けておき、M2ネジとナットでサーボに取り付けます。足先側は、サーボ90°設定状態で図のような角度にパーツを取り付けます。
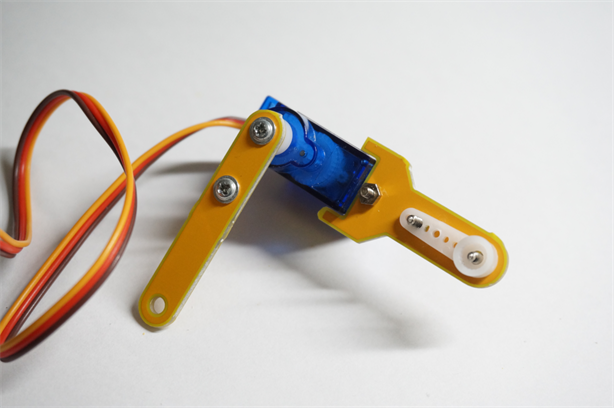
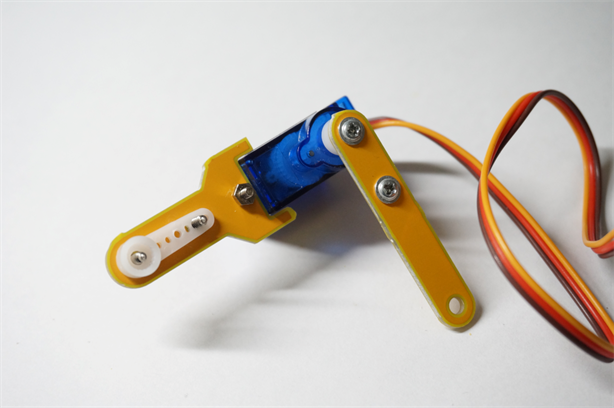
股(肩)関節ピッチ軸とひざ(ひじ)関節部との接続は、4つの脚(前後左右)でそれぞれ異なります。上側の図(右脚後-前)、下側の図(左脚前-後)を参照してください。前と後ろで股(肩)関節ピッチ軸サーボの向きが異なります。(前脚はサーボの出力軸が前側、後ろ脚はサーボの出力軸が後ろ側となります。)また、取り付け角度を図のように45°となるようにしてください。

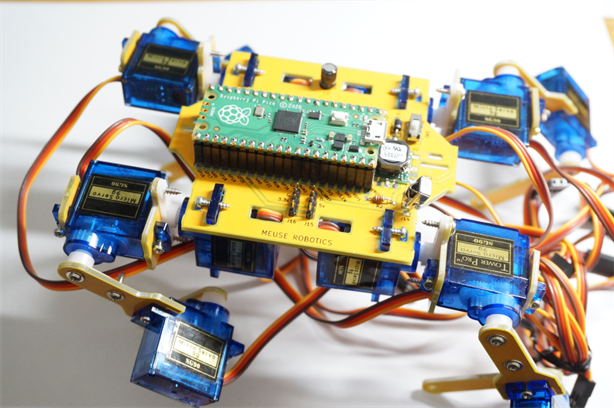
■メインボードに脚を取り付け
メインボード基板に脚を取り付けます。股関節ピッチ軸サーボのリブをロール軸のプレートの長穴に通して仮止めします。
股関節ロール軸の反対側の軸受けとなるパーツを取り付けます。まず下図のようにM2.6ネジとナットで軸を作成します。
M2x6mmタッピングスクリューでパーツを取り付けます。ロボット後ろ側も同様です。

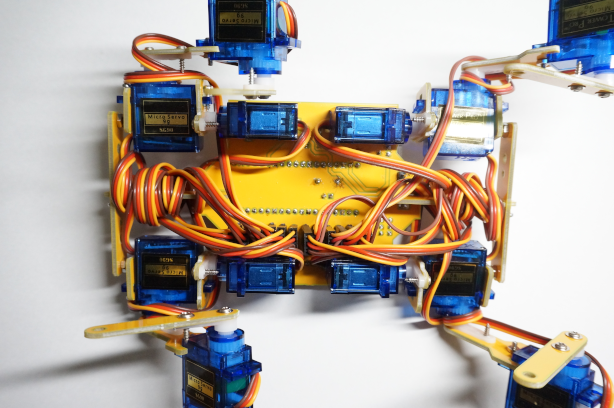
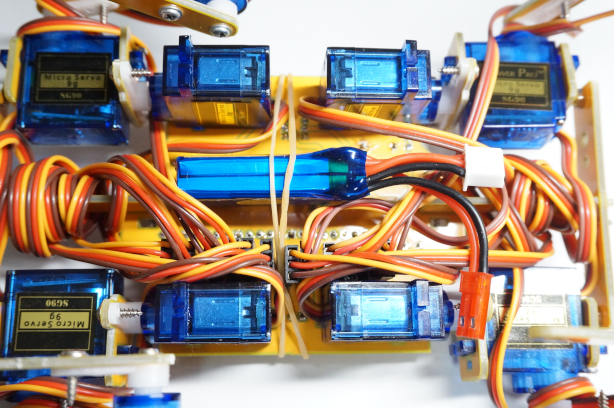
●ワイヤーの整理
表を参照してサーボワイヤーを基板のコネクタに接続し、余った部分をうまくボディに収めます。左右股関節サーボの間のスペースにパーツに巻きつけるようにします。膝関節サーボはワイヤーをきつく引っ張りすぎると動作に影響を与えますので適度に緩めておきましょう。
表 ロボットの関節とサーボ
| SV11 | GPIO11 | J12 | Left Front Hip Roll | 左前股関節ロール軸 |
| SV10 | GPIO10 | J11 | Left Front Hip Pitch | 左前股関節ピッチ軸 |
| SV9 | GPIO9 | J10 | Left Front Knee Pitch | 左前ひざピッチ軸 |
| SV8 | GPIO8 | J9 | RightFront Hip Roll | 右前股関節ロール軸 |
| SV7 | GPIO7 | J8 | Right Front Hip Pitch | 右前股関節ピッチ軸 |
| SV6 | GPIO6 | J7 | RightFront Knee Pitch | 右前ひざピッチ軸 |
| SV5 | GPIO5 | J6 | Left Hind Hip Roll | 左後股関節ロール軸 |
| SV4 | GPIO4 | J5 | Left Hind Hip Pitch | 左後股関節ピッチ軸 |
| SV3 | GPIO3 | J4 | Left Hind Knee Pitch | 左後ひざピッチ軸 |
| SV2 | GPIO2 | J3 | RightHind Hip Roll | 右後股関節ロール軸 |
| SV1 | GPIO1 | J2 | Right Hind Hip Pitch | 右後股関節ピッチ軸 |
| SV0 | GPIO0 | J1 | RightHind Knee Pitch | 右後ひざピッチ軸 |
●バッテリーの取り付け
バッテリーは使用するタイプによって大きさ、形状が様々ですので、今回はちょっと安易ですが輪ゴムで固定することとします。上面側の部品(コンデンサとコネクタ)に輪ゴムをひっかけて裏側にバッテリーを設置します。

コメント