Unityで学ぶ ロボットアームの逆運動学 (MRブックス)
ロボットアームの逆運動学(Inverse Kinematics)をUnityアプリをつくりながら学びます。2軸アームの基本的な問題を三角関数で解くところから入り、6軸アームの解析的手法、数値的手法まで進みます。
* Unity6に対応しました。
内容
www.amazon.co.jp
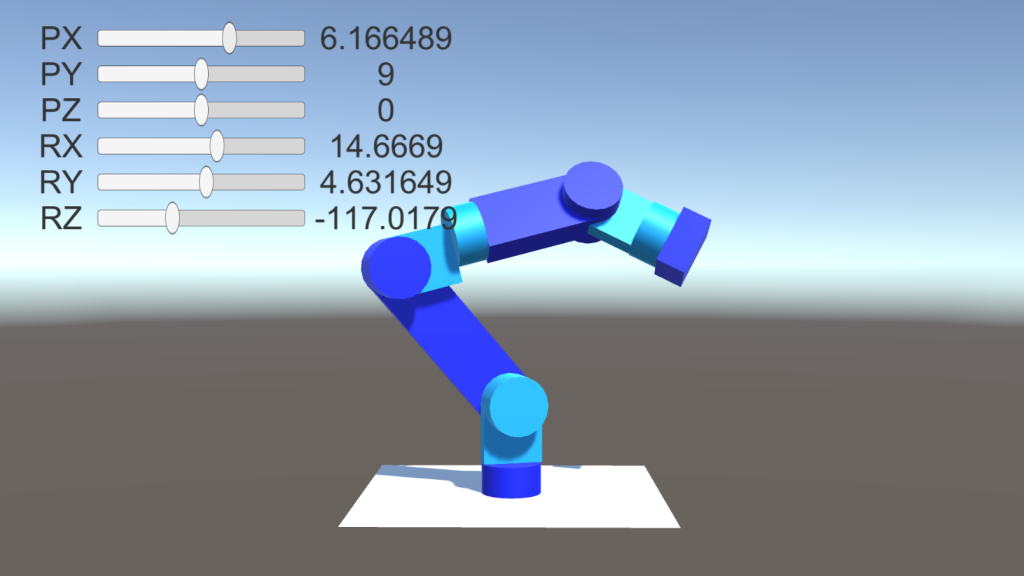
ロボットアームの逆運動学(Inverse Kinematics)をUnityアプリをつくりながら学びます。2軸アームの基本的な問題を三角関数で解くところから入り、6軸アームの解析的手法、数値的手法まで進みます。
内容
第1章 2自由度アームロボットの運動学
1-1 関節角度から手先位置を求める
1-2 Unityでモデルを作成
1-3 運動学(Forward Kinematics)を実装
第2章 2自由度アームロボットの逆運動学
2-1 手先位置から関節角度を求める
2-2 逆運動学(Inverse Kinematics)を実装
第3章 3自由度ロボットアームの逆運動学
3-1 手先位置から関節角度を求める
3-2 逆運動学(Inverse Kinematics)を実装
第4章 6自由度アームロボットの逆運動学
4-1 6自由度モデルに拡張
4-2 逆運動学(Inverse Kinematics)を実装
第5章 6自由度逆運動学の数値解法
5-1 逆運動学の数値解法
5-2 逆運動学の数値解法を実装
第6章 異なるタイプのロボット
6-1 UR3アームロボット

コメント