●その他の動作
歩行動作プログラミングの最後にいくつか特徴的なアクションを追加しておきます。
■ウォーク歩行
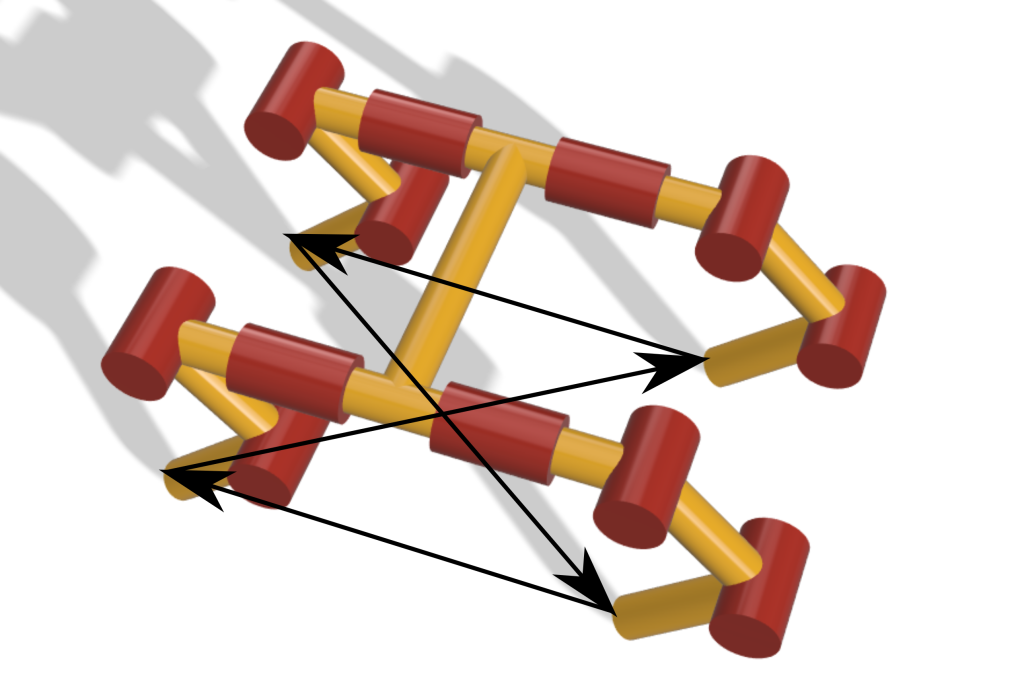
ウォークという名称がまぎらわしいですが、1脚ずつ順番に遊脚(空中で後ろから前に足を振る)となる歩行です。左後ろ→左前→右後ろ→右前の順となります。接地している3脚がつくる三角形の内側にロボットの重心が入るようにすることで、ゆっくりと安定した歩行が可能となります。
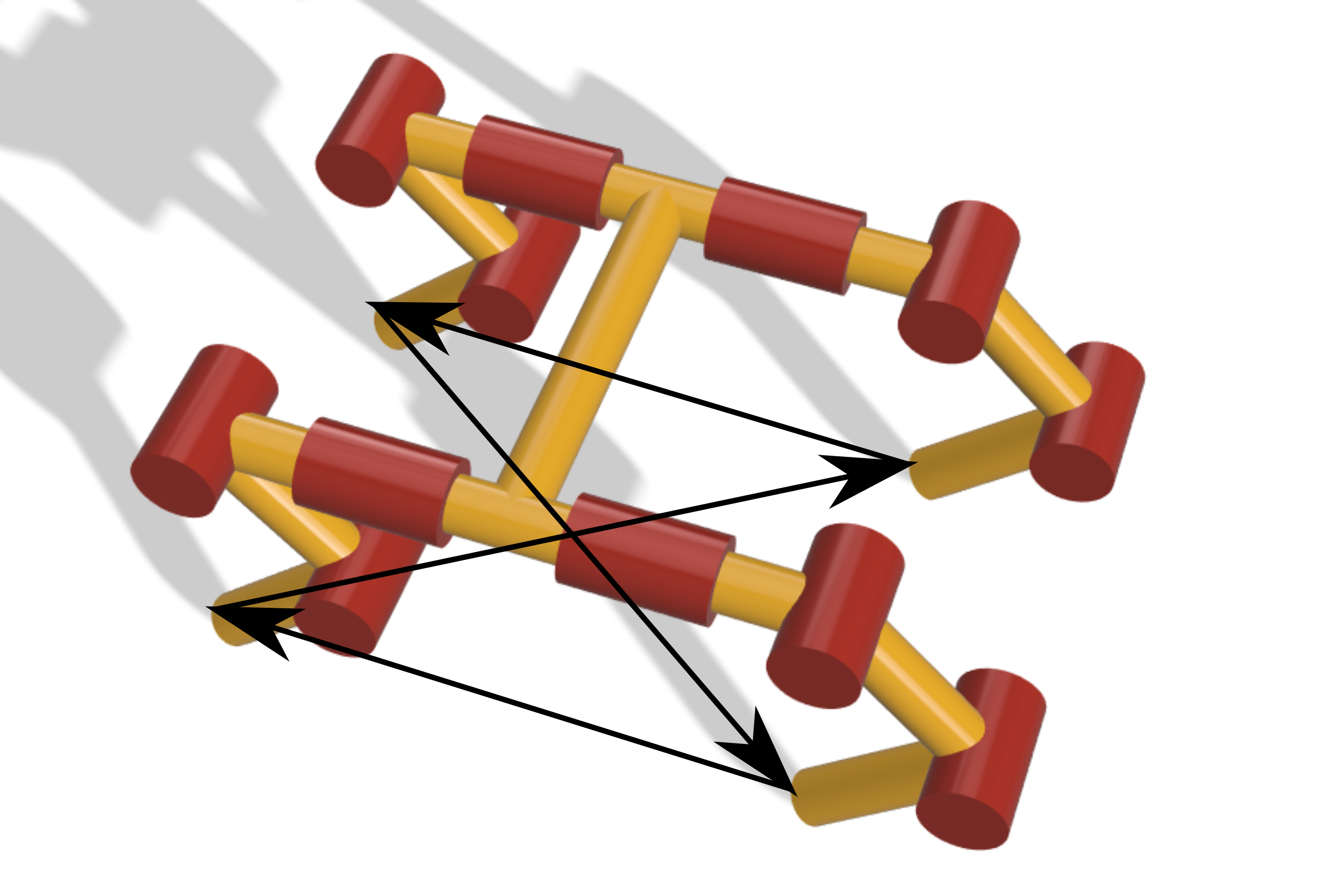
ウォーク歩行データの例を示しておきます。遊脚の軌跡はこれまでと同じです。接地期間のフレーム数が増えましたので等速に動かすための数値決めが面倒ですが、今回はエクセルを使って算出しました。
walk = [\
[90,105,70,90,83,98,90,91,87,90,78,105, 3],\
[90,100,110,90,81,101,90,93,85,90,76,107, 3],\
[90,90,90,90,80,103,90,95,83,90,75,110, 3],\
[90,91,87,90,78,105,90,96,81,90,75,110, 3],\
[90,93,85,90,76,107,90,98,78,90,80,70, 3],\
[90,95,83,90,75,110,90,100,76,90,90,90, 3],\
[90,96,81,90,75,110,90,101,74,90,88,92, 3],\
[90,98,78,90,80,70,90,103,72,90,86,94, 3],\
[90,100,76,90,90,90,90,105,70,90,85,96, 3],\
[90,101,74,90,88,92,90,105,70,90,83,98, 3],\
[90,103,72,90,86,94,90,100,110,90,81,101, 3],\
[90,105,70,90,85,96,90,90,90,90,80,103, 3]\
]■エグザイルモーション
ボディをくねくねと回すアクションです。
exile = [\
[ 75, 90, 90, 75, 90, 90, 75, 90, 90, 75, 90, 90, 20],\
[ 90,105,120, 90, 75, 60, 90, 75, 60, 90,105,120, 20],\
[105, 90, 90,105, 90, 90,105, 90, 90,105, 90, 90, 20],\
[ 90, 75, 60, 90,105,120, 90,105,120, 90, 75, 60, 20]\
]
コメント